Destek
Destek
Giriş Yapın
Üye Ol
Çıkış yap
TEDAVİ ALANLARI
MAKALELER
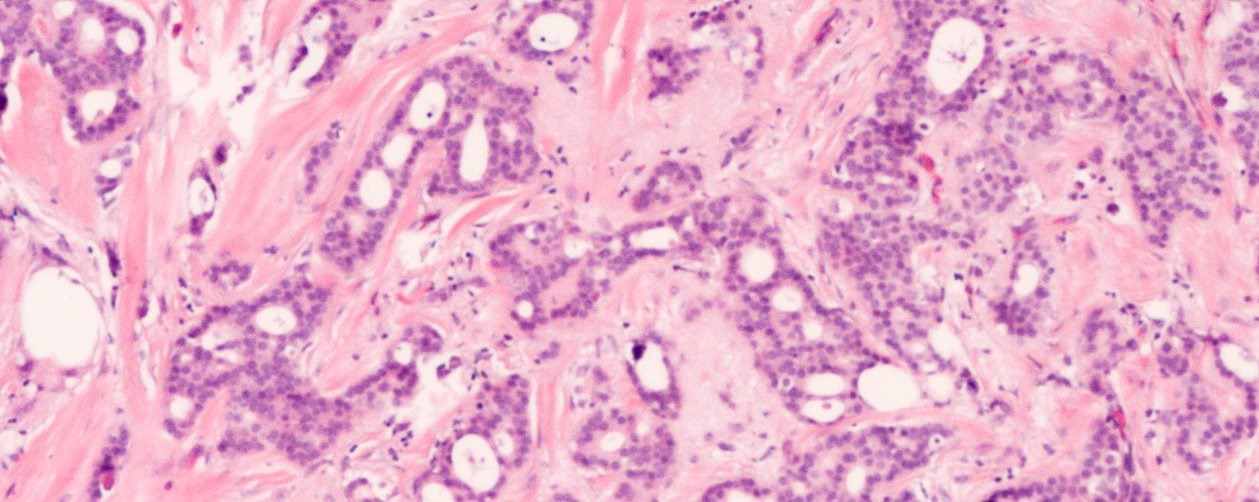
Breast cancer
Oncology
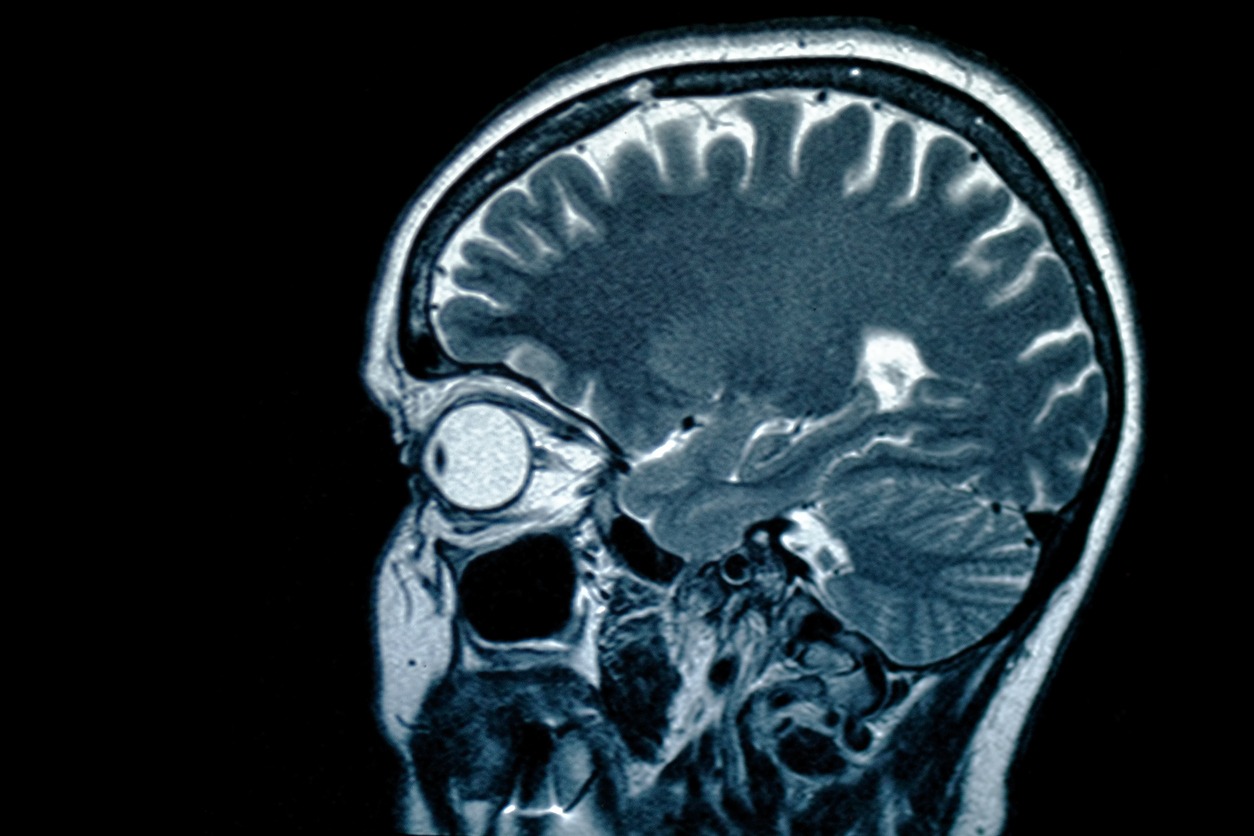
Multiple sclerosis
Neuroscience
Breast cancer
Oncology
Multiple sclerosis
Neuroscience
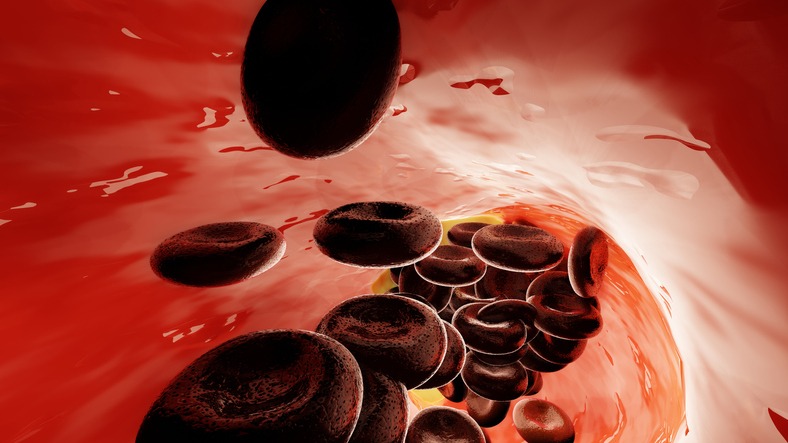
Haematology
Hemophilia
Daha fazla makale için tıklayın...
Devam etmek istiyor musunuz?
?qlt=92&ts=1710509811781&$EhePngAlpha$&dpr=off)